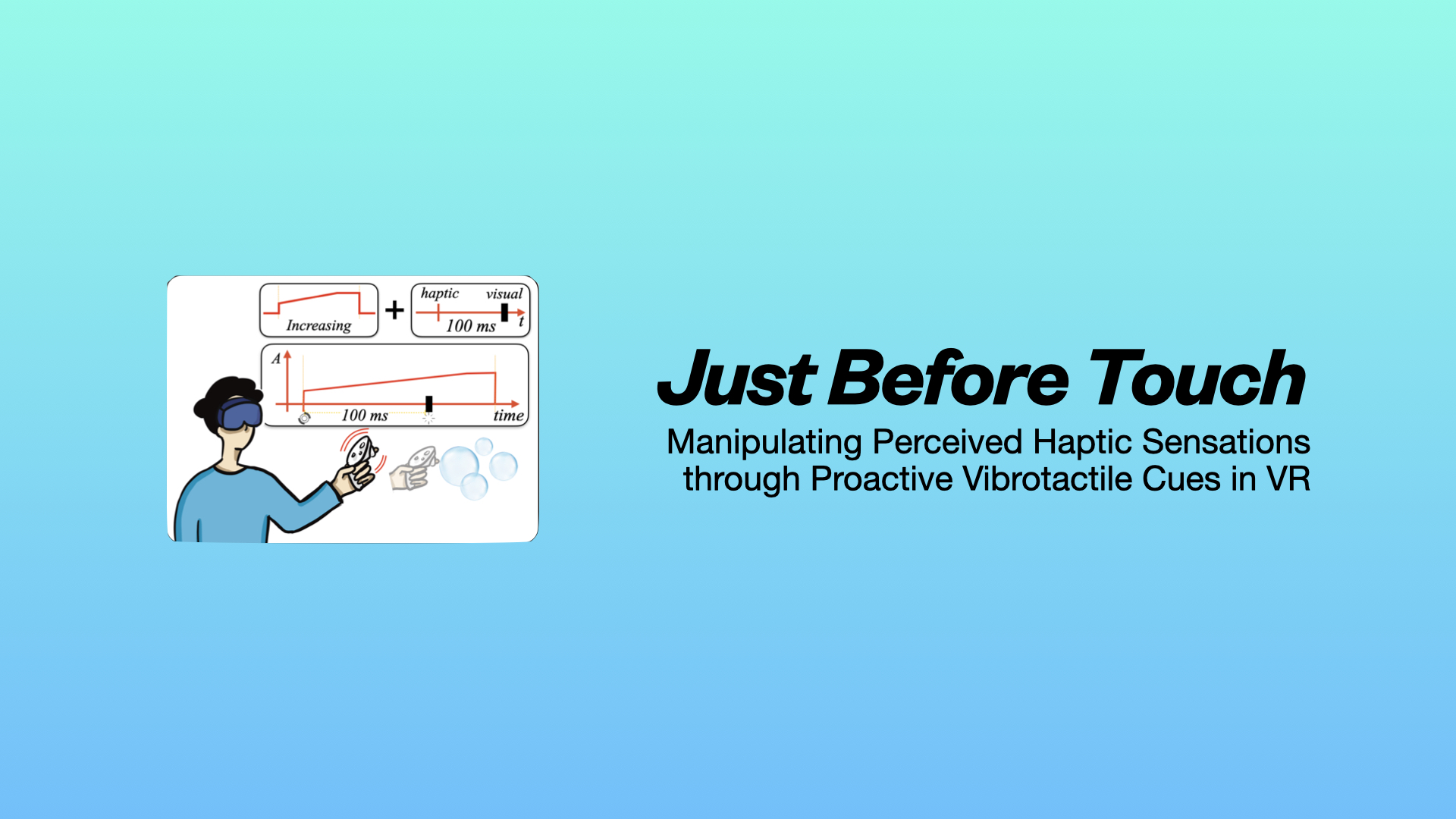
Just Before Touch: Manipulating Perceived Haptic Sensations through Proactive Vibrotactile Cues in VR
This project explores proactive haptics — delivering vibrotactile cues before a touch event using hand motion prediction — to create novel pseudo-haptic sensations such as stickiness, elasticity, and diffuseness in virtual reality.
Overview
Just Before Touch introduces proactive haptics, a novel concept that delivers vibrotactile cues before a touch event occurs in virtual reality. Using a hand motion prediction model, the system calculates hand trajectory and triggers tactile feedback in the temporal window just before the virtual hand contacts a virtual object. Combined with six carefully designed haptic profiles, proactive haptics can evoke a variety of pseudo-haptic sensations — including stickiness, elasticity, diffuseness, and softness — without any additional hardware beyond standard VR controllers.
Vision
Current VR systems provide tactile feedback reactively, triggered only after a user interaction is detected. Yet the temporal aspect of touch plays a crucial role in shaping tactile experiences. Research on visual-haptic asynchrony has shown that users have a notable tolerance for temporally advanced haptic feedback — up to 100ms before visual contact without noticeably affecting realism. This project exploits that perceptual window to create an entirely new design space: the temporal space before touch. By carefully controlling when and how vibrotactile cues are delivered before contact, we can simulate diverse material properties and haptic sensations that are difficult to achieve with reactive feedback alone.
How It Works
Hand Motion Prediction
The system uses a parametric hand motion prediction model that forecasts future hand positions based on the first five derivatives of motion (velocity, acceleration, jerk, snap, and crackle). Running at 80Hz on a Meta Quest 3, the model predicts hand positions 62.5ms and 100ms into the future with sufficient accuracy to trigger haptic cues before visual contact occurs.
Haptic Profiles
Six haptic profiles augment the proactive vibrotactile cues, each describing how the amplitude of feedback changes over the interaction:
- Constant — Steady amplitude from predicted collision to hand exit; serves as the baseline.
- Pulse — A fixed-duration vibrotactile burst triggered at the predicted collision point.
- Increasing — Amplitude ramps up at a fixed rate from the predicted collision.
- Decreasing — Amplitude ramps down at a fixed rate from the predicted collision.
- Positive-a — Amplitude dynamically adjusts proportional to hand acceleration.
- Negative-a — Amplitude dynamically adjusts inversely proportional to hand acceleration.
Perceived Sensations
Different combinations of prediction time and haptic profile evoke distinct pseudo-haptic sensations:
- Radiating — 100ms Constant profile; vibration begins before contact, creating a spreading-outward sensation.
- Absorbing — Pulse profile at lower prediction times; the brief burst feels like energy being drawn inward.
- Soft — 100ms Decreasing profile; sustained, gentler feedback mirrors how soft objects feel in reality.
- Rigid — Lower prediction times; immediate, short feedback resembles hard surfaces.
- Diffuse — 100ms Increasing profile; haptic cues before visual contact create a fuzzy, spread-out sensation.
- Elastic — 100ms Negative-a profile; sustained vibration with resistance during deceleration gives a rubbery feel.
Evaluation
Preliminary Study
A pilot study with 13 participants validated the system's accuracy and assessed realism. Results showed no significant difference in realism ratings between reactive (0ms) and proactive (62.5ms, 100ms) conditions, confirming that proactive haptic cues can be delivered without affecting perceived realism.
Perception Study
A formal study with 15 participants (270 trials) investigated perceived sensations across all combinations of prediction time and haptic profile. Key findings:
- 9 out of 18 sensation terms showed statistically significant differences between reactive and proactive conditions (weak, soft, localized, pulling, pulsing, elastic, smooth, slippery, sticky).
- Antonymous sensation pairs (absorbing-radiating, soft-rigid, pushing-pulling, diffuse-localized, elastic-static) demonstrated clear opposing trends across prediction times and profiles.
- Participants' qualitative descriptions aligned with physical intuitions about the sensations.
Applications
- Sample Room — A VR environment where virtual objects each produce a specific sensation using different prediction times and haptic profiles, allowing users to experience the full range of proactive haptic effects.
- VR Fruit Ninja — Integration with an open-source VR game, delivering soft sensations for fruits, rigid sensations for watermelons, and radiating sensations for bombs.
Open Source
The proactive haptics system is released as an open-source Unity package for designers and researchers to explore and create new haptic profiles.
Team Members


Related Publications
Just Before Touch: Manipulating Perceived Haptic Sensations through Proactive Vibrotactile Cues in Virtual Reality
Y Dong, P Somarathne, CT Jin, J Kim, A Bianchi, A Withana
Project Details
Timeline
Started: June 1, 2024
External Collaborators
- Juno Kim (UNSW)
- Andrea Bianchi (KAIST)